操作系统——进程的概念
文章目录
前言: 进程是什么?为什么有进程?怎样管理进程?这是本篇文章要搞定的问题。同学们注意了,鸡汤来喽!!!
1.进程的概念
1.1 进程初始
操作系统只认识二进制文件,所谓程序就是一个二进制文件,操作系统要运行程序时,该怎么操作呢?这就需要进程:程序被触发后,执行者的权限与属性,程序的代码与所需数据都会被加载到内存中,这个过程就是进程。
进程:程序代码+相关数据集
加载进内存该如何管理呢?操作系统需要直接面向加载到内存中的代码嘛?答案是不需要。
举个例子:
操作系统(校长),老师(进程控制块),学生(程序)。校长想要了解某个学生的学习情况,会去直接找学生嘛?一般不会,会去找对应的老师,向她问候一下学生情况,结果表示学生的成绩好,可以考虑保送(优先级高),校长说那就保送吧(开始执行),校长通过老师把学生给办了。
1.2 进程控制块—test_struct
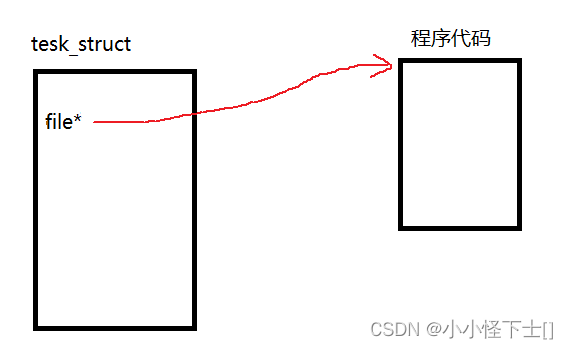
所以每个程序在进入内存时,操作系统会自动创建一个PCB结构体来存放进程信息,Linux操作系统的PCB是task_struct,大家可能好奇程序代码也存在task_struct中嘛?task_struct存信息,它存的是指向程序代码的指针,程序代码是加载到内存中的。
可以看下task_struct中的内容:
struct task_struct
{
//说明了该进程是否可以执行,还是可中断等信息
volatile long state;
//Flage 是进程号,在调用fork()时给出
unsigned long flags;
//进程上是否有待处理的信号
int sigpending;
//进程地址空间,区分内核进程与普通进程在内存存放的位置不同
mm_segment_t addr_limit; //0-0xBFFFFFFF for user-thead
//0-0xFFFFFFFF for kernel-thread
//调度标志,表示该进程是否需要重新调度,若非0,则当从内核态返回到用户态,会发生调度
volatile long need_resched;
//锁深度
int lock_depth;
//进程的基本时间片
long nice;
//进程的调度策略,有三种,实时进程:SCHED_FIFO,SCHED_RR, 分时进程:SCHED_OTHER
unsigned long policy;
//进程内存管理信息
struct mm_struct *mm;
int processor;
//若进程不在任何CPU上运行, cpus_runnable 的值是0,否则是1 这个值在运行队列被锁时更新
unsigned long cpus_runnable, cpus_allowed;
//指向运行队列的指针
struct list_head run_list;
//进程的睡眠时间
unsigned long sleep_time;
//用于将系统中所有的进程连成一个双向循环链表, 其根是init_task
struct task_struct *next_task, *prev_task;
struct mm_struct *active_mm;
struct list_head local_pages; //指向本地页面
unsigned int allocation_order, nr_local_pages;
struct linux_binfmt *binfmt; //进程所运行的可执行文件的格式
int exit_code, exit_signal;
int pdeath_signal; //父进程终止是向子进程发送的信号
unsigned long personality;
//Linux可以运行由其他UNIX操作系统生成的符合iBCS2标准的程序
int did_exec:1;
pid_t pid; //进程标识符,用来代表一个进程
pid_t pgrp; //进程组标识,表示进程所属的进程组
pid_t tty_old_pgrp; //进程控制终端所在的组标识
pid_t session; //进程的会话标识
pid_t tgid;
int leader; //表示进程是否为会话主管
struct task_struct *p_opptr,*p_pptr,*p_cptr,*p_ysptr,*p_osptr;
struct list_head thread_group; //线程链表
struct task_struct *pidhash_next; //用于将进程链入HASH表
struct task_struct **pidhash_pprev;
wait_queue_head_t wait_chldexit; //供wait4()使用
struct completion *vfork_done; //供vfork() 使用
unsigned long rt_priority; //实时优先级,用它计算实时进程调度时的weight值
//it_real_value,it_real_incr用于REAL定时器,单位为jiffies, 系统根据it_real_value
//设置定时器的第一个终止时间. 在定时器到期时,向进程发送SIGALRM信号,同时根据
//it_real_incr重置终止时间,it_prof_value,it_prof_incr用于Profile定时器,单位为jiffies。
//当进程运行时,不管在何种状态下,每个tick都使it_prof_value值减一,当减到0时,向进程发送
//信号SIGPROF,并根据it_prof_incr重置时间.
//it_virt_value,it_virt_value用于Virtual定时器,单位为jiffies。当进程运行时,不管在何种
//状态下,每个tick都使it_virt_value值减一当减到0时,向进程发送信号SIGVTALRM,根据
//it_virt_incr重置初值。
unsigned long it_real_value, it_prof_value, it_virt_value;
unsigned long it_real_incr, it_prof_incr, it_virt_value;
struct timer_list real_timer; //指向实时定时器的指针
struct tms times; //记录进程消耗的时间
unsigned long start_time; //进程创建的时间
//记录进程在每个CPU上所消耗的用户态时间和核心态时间
long per_cpu_utime[NR_CPUS], per_cpu_stime[NR_CPUS];
//内存缺页和交换信息:
//min_flt, maj_flt累计进程的次缺页数(Copy on Write页和匿名页)和主缺页数(从映射文件或交换
//设备读入的页面数); nswap记录进程累计换出的页面数,即写到交换设备上的页面数。
//cmin_flt, cmaj_flt, cnswap记录本进程为祖先的所有子孙进程的累计次缺页数,主缺页数和换出页面数。
//在父进程回收终止的子进程时,父进程会将子进程的这些信息累计到自己结构的这些域中
unsigned long min_flt, maj_flt, nswap, cmin_flt, cmaj_flt, cnswap;
int swappable:1; //表示进程的虚拟地址空间是否允许换出
//进程认证信息
//uid,gid为运行该进程的用户的用户标识符和组标识符,通常是进程创建者的uid,gid
//euid,egid为有效uid,gid
//fsuid,fsgid为文件系统uid,gid,这两个ID号通常与有效uid,gid相等,在检查对于文件
//系统的访问权限时使用他们。
//suid,sgid为备份uid,gid
uid_t uid,euid,suid,fsuid;
gid_t gid,egid,sgid,fsgid;
int ngroups; //记录进程在多少个用户组中
gid_t groups[NGROUPS]; //记录进程所在的组
//进程的权能,分别是有效位集合,继承位集合,允许位集合
kernel_cap_t cap_effective, cap_inheritable, cap_permitted;
int keep_capabilities:1;
struct user_struct *user;
struct rlimit rlim[RLIM_NLIMITS]; //与进程相关的资源限制信息
unsigned short used_math; //是否使用FPU
char comm[16]; //进程正在运行的可执行文件名
//文件系统信息
int link_count, total_link_count;
//NULL if no tty 进程所在的控制终端,如果不需要控制终端,则该指针为空
struct tty_struct *tty;
unsigned int locks;
//进程间通信信息
struct sem_undo *semundo; //进程在信号灯上的所有undo操作
struct sem_queue *semsleeping; //当进程因为信号灯操作而挂起时,他在该队列中记录等待的操作
//进程的CPU状态,切换时,要保存到停止进程的task_struct中
struct thread_struct thread;
//文件系统信息
struct fs_struct *fs;
//打开文件信息
struct files_struct *files;
//信号处理函数
spinlock_t sigmask_lock;
struct signal_struct *sig; //信号处理函数
sigset_t blocked; //进程当前要阻塞的信号,每个信号对应一位
struct sigpending pending; //进程上是否有待处理的信号
unsigned long sas_ss_sp;
size_t sas_ss_size;
int (*notifier)(void *priv);
void *notifier_data;
sigset_t *notifier_mask;
u32 parent_exec_id;
u32 self_exec_id;
spinlock_t alloc_lock;
void *journal_info;
};
内容很多,学习成本较大,这里简单讲讲其中的内容:
标示符: 描述本进程的唯一标示符,用来区别其他进程。
状态: 任务状态,退出代码,退出信号等。
优先级: 相对于其他进程的优先级。
程序计数器: 程序中即将被执行的下一条指令的地址。
内存指针: 包括程序代码和进程相关数据的指针,还有和其他进程共享的内存块的指针
上下文数据: 进程执行时处理器的寄存器中的数据[休学例子,要加图CPU,寄存器]。
I/O状态信息: 包括显示的I/O请求,分配给进程的I/O设备和被进程使用的文件列表。
记账信息: 可能包括处理器时间总和,使用的时钟数总和,时间限制,记账号等。
其他信息;
这些内容在下面的学习中,都会遇见,倒是在细讲。
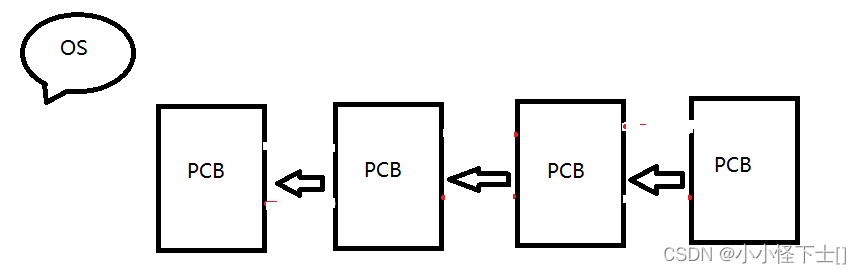
1.3 进程组织
进程信息由进程控制块存放,操作系统直接查看进程控制块就可以做出相应的操作。还有个问题:就是多个进程之间如何管理呢?谁先谁后?
多个进程控制块,用双向链表的形式存着,每个都是一个节点,这样就管理起来了,可以更据优先级信息等来判断,那个先执行等。
2.人为管理进程的操作
2.1 查看进程
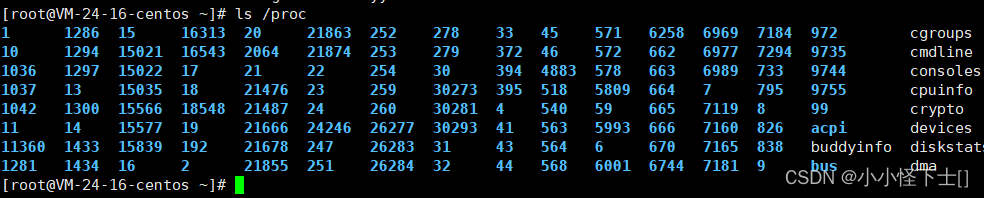
(1)进程信息可以通过 /porc系统文件夹查看,具体查看那个进程,需要得知其标识符(PID)。
看到以下有很多的数字还是蓝标的,数字就是PID,蓝标说明这是个目录,比如接下来我想看看PID为1286的进程信息。
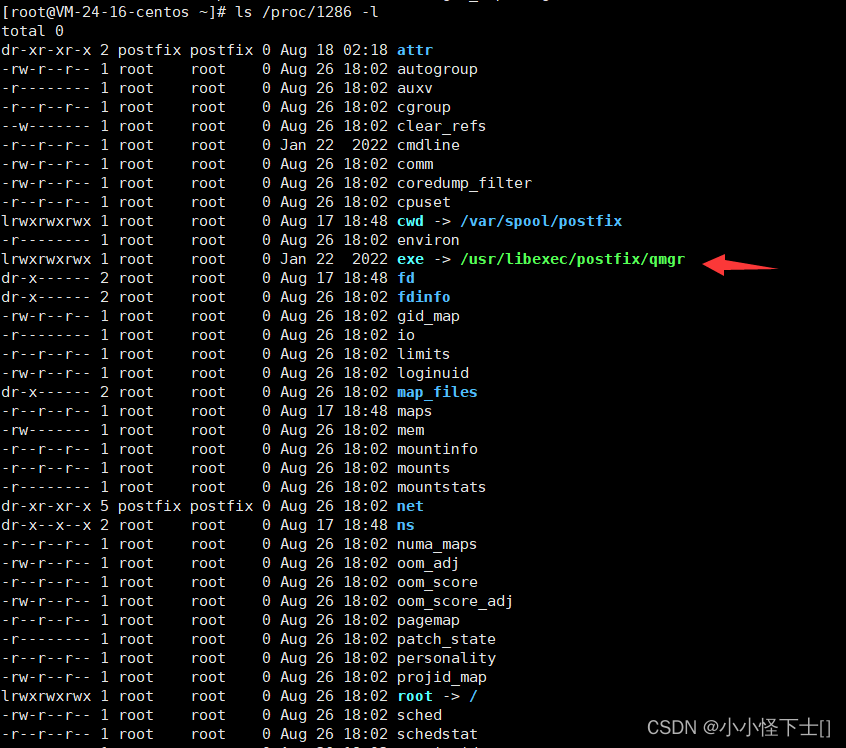
这个信息查看的不够银杏,所以可以带上 -l选项查看详细信息

详细了不少,但是也许只能看懂一个exe可执行文件。
(2)用ps工具来查看
关于ps工具,咱们只需要记住,只查看自己的bash进程选项为 -l,查看系统所有运行的进程选项为aux,这个不加-。

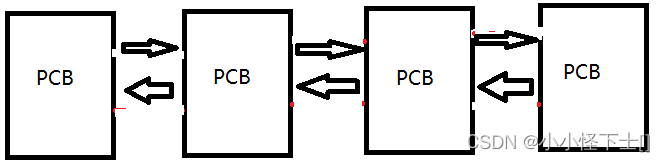
这里可以看到,标识符PID展示出来了,还有一个PPID,这是父进程的PID,我们惊奇的发现,下面的ps指令的PPID是上面bash的PID。

命令行上的命令的父进程基本上都是bash。
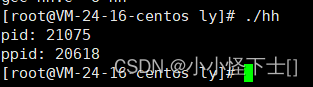
2.2 进程标识符的获取
#include <stdio.h>
#include <sys/types.h>
#include <unistd.h>
int main()
{
//getpid()获取进程标识符
printf("pid: %d\n", getpid());
//getppid()获取父进程标识符
printf("ppid: %d\n", getppid());
return 0;
}
2.3 创建进程fork()
利用fork()可以创建子进程。
1 #include <stdio.h>
2 #include <sys/types.h>
3 #include <unistd.h>
4 int main()
5 {
6 fork();
7 printf("hollow fork\n");
8 sleep(1);
9 return 0;
10 }
看看运行结果:

惊奇的发现,hollow fork被打印了两遍。这就有些奇怪了。因为fork()创建了子进程,俩个进程所以会打印俩次。为什么两个进程会打印俩次呢?
默认情况下:子进程会继承父进程的代码和数据,包括PCB也会以父进程的PCB为模板来初始化。
因为子进程继承了父进程的代码,所以它会打印俩次。创建一个子进程去做父进程一样的事有意义嘛?没有,所以fork()有返回值,通过返回值来区别子进程和父进程。
- 返回值<0,子进程创建失败
- 返回值=0,这是子进程
- 返回值>0,并且等于子进程的PID,这是父进程
所以利用返回值,我们来让子进程做点不一样的事:
1 #include <stdio.h>
2 #include <sys/types.h>
3 #include <unistd.h>
4 int main()
5 {
6 pid_t i= fork();
7 if(i==0)
8 {
9 printf("i am child\n",i);
10 }
11 else if(i>0)
12 {
13 printf("i am father\n",i);
14 }
15 else
16 {
17 printf("nonono\n");
18 }
19
20 return 0;
21 }

有两个返回值,是因为有两个进程。
2.4 消灭指定进程
这个用的是指令kill,我们可以看一下kill的选项。
着重记住:
-9 干掉指定的进程
kill -9 PID
-19 暂停指定进程kill -19 PID
-18 解除暂停kill -18 PID
3. 进程的状态
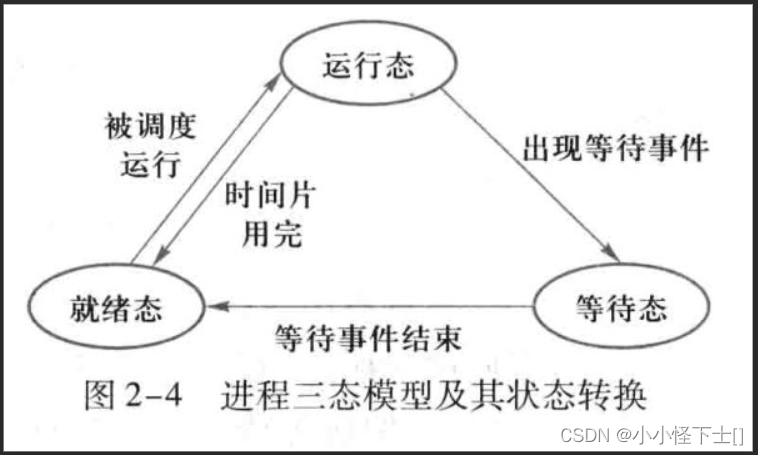
在读课本的时候,或是听老师讲解时,多数会给出以上的图片。但是具体有哪些状态呢?就三种状态吗?如何进行查看进程状态呢?这都是没解决的问题。
3.1 基本的进程状态
- R运行状态(running): 并不意味着进程一定在运行中,它表明进程要么是在运行中要么在运行队列
- S睡眠状态(sleeping): 意味着进程在等待事件完成(这里的睡眠有时候也叫做可中断睡眠)
- D磁盘休眠状态(Disk sleep)有时候也叫不可中断睡眠状态(uninterruptible sleep),在这个状态的进程通常会等待IO的结束。
- T停止状态(stopped): 可以通过发送 SIGSTOP 信号给进程来停止(T)进程。这个被暂停的进程可
以通过发送 SIGCONT 信号让进程继续运行。- X死亡状态(dead):这个状态只是一个返回状态,你不会在任务列表里看到这个状态。
(1)R运行状态。
前文讲过进程是靠进程控制块来管理的,操作系统通过管理进程控制块来决定执行哪个进程。该先执行哪个进程?得排队对吧。所以用队列这种数据结构来管理一堆得进程控制块,轮到谁就运行谁。
这些进程都是R状态:随时都准备被运行的状态(在运行队列中)。
这个状态给人的感觉就是箭在弦上,蓄势待发,或者已经出发。
验证:
一个死循环程序,来看看进程的运行状态,程序名为ll。
#include<stdio.h>
2 int main()
3 {
4 while(1)
5 ;
6 return 0;
7 }
8
ps aux|grep 程序名

可以看到运行状态时R+,这个加号代表在前台运行,如果想要从前台切换到后台运行,那么可以在运行程序命令行后加上&。
比如:
./ll &
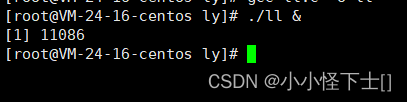
可以看到这次为R运行状态。

(2)S和D睡眠状态
一个是可被打断睡眠,一个是不可被打断睡眠。为什么会有这俩种状态呢?我们进程有可能没有达到可执行的条件。
比如:一个进程需要调用显示器,但是显示器已经被其他的进程给占用了;那么这个进程就需要等待,而且有等待队列,它就去里面排队了。如果它在运行队列中,那么操作系统毫无疑问会把这个进程踢到等待队列里,不让它占用资源。
操作系统可以把S状态的等待进程,踢到等待队列里。但是D状态不行,D状态为不可打断睡眠,操作系统不可以将D状态的进程,放到等待队列中。D状态是大哥呀,睡得死死得,一直得等达到可执行条件满足,而且依旧占用CPU资源。如果想干掉D状态进程,可以考虑关机。
那么为什么存在D状态进程,首先它肯定是有必须等待的理由,比如这个进程正准备在从磁盘里读重要数据,但是磁盘在忙,如果操作系统看见此进程在等待,把它给踢走了,等磁盘将数据拿出来了,该给谁?这个锅谁背?其次,可能就是自己代码写的有些问题,需要去好好查看一下。
等待队列是一个双向链表。
这里解释两个定义:
- 将进程从运行队列,搞到等待队列,这就叫做挂起进程。
- 将进程从等待队列,搞到运行队列,这就叫做唤醒进程。
验证:
还是改改那个上面那个ll程序。
1 #include<stdio.h>
2 int main()
3 {
4 while(1)
5 {
6 printf("hollow S\n");
7 }
8 return 0;
9 }
可能有疑问,这不死循环吗?是R状态吧?

这个程序的状态是S+,+号表示前台运行。是S的原因:IO流太慢了相对于CPU,所以一直是挂起又唤醒,挂起又唤醒的。咱们也许看到刷屏挺快,但对于CPU来说,要输入到显示器上太慢了,所以秒挂起进程,又秒唤醒进程。
至于D状态我就不验证了。
(3)T暂停状态
暂停状态,就是进程暂停不动了。可以用kill -19来暂停进程。
验证:
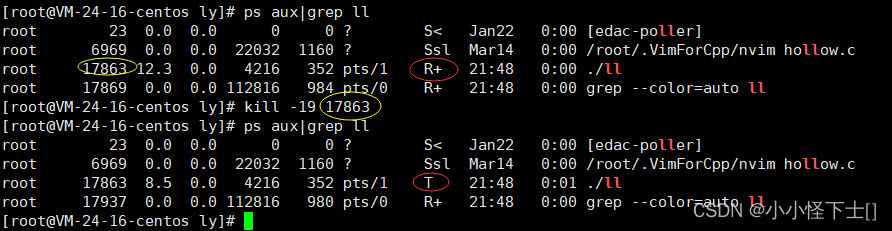
这就把进程暂停了,
解除暂停kill -18

(4)X状态进程结束
进程结束,操作系统会回收进程的资源:内核数据结构+代码,数据
有一个疑问:子进程结束就直接结束吗?它是如何结束的?异常退出?正常执行结束?如果是异常结束,证明有问题,需要查出问题所在。所以子进程结束时,父进程会读取进程退出信息。
在这里引出两种特殊的进程状态。
3.2 特殊的进程状态
(1)Z状态僵尸进程
子进程结束,但是它的退出信息没有被父进程读取,子进程会进入Z状态等待被父进程读取退出信息。
验证:可以写个程序
1 #include<stdio.h>
2 #include<unistd.h>
3 int main()
4 {
5 pid_t i=fork();
6 if(i==0)
7 {
8 printf("i am child my father:%d\n",getppid());
9 sleep(5);
10 }
11 else
12 {
13 printf("i am father,i am runing\n");
14 sleep(100);
15 }
16 return 0;
17 }
18
可以看到我让父进程多运行了一段时间,保证子进程退出时,父进程还在运行。
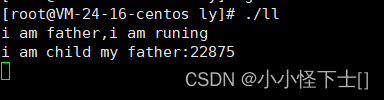

子进程的父进程PID是22875,它明显还在运行,但是子进程已经退出,父进程在运行无法查看子进程的退出信息,所以子进程为僵尸进程,状态为Z。
(2)孤儿进程
因为父进程没有读取子进程的退出信息,子进程为Z状态,父进程还在运行没有时间去查看子进程的退出信息,这时候子进程为僵尸进程。
如果父进程比子进程要早结束,这种情况下,因为没有父进程所以被称为孤儿进程。但是孤儿进程会被领养,那就是PID为1的Init,最终也会由Init来读取其退出信息。被领养时,孤儿进程还在运行那么进程状态为R或S;若不运行了,那么它的进程状态为Z,Init接受退出信息后,由Z转为X。
验证:只需要对上面的程序稍作改动,让父进程提前结束掉即可
1 #include<stdio.h>
2 #include<unistd.h>
3 #include<stdlib.h>
4 int main()
5 {
6 pid_t i=fork();
7 if(i==0)
8 {
9 printf("i am child my father:%d\n",getppid());
10 sleep(100);
11 }
12 else
13 {
14 printf("i am father,i don't need you,chile\n");
15 sleep(3);
16 exit(0);
17 }
18 return 0;
19 }
20
为了查看最后它的养父Init,用ps-elf|grep ll来查看。这个可以看到父进程的PID。

首先,父进程没退出时,父进程的PID为28501

这幅图片,上面的是父进程28501,下面是子进程28502。然后父进程提早结束,看看父进程会是PID为1的Init吗?

很明显,子进程28502的父进程变成了PID为1的Init。
4.进程的优先级
上文讲过,有运行队列,也就是说在运行队列中的进程都是R状态。但运行队列应该怎样排队呢?
讲一个生活中的例子:假如去做车保养,普通车主可能就得排队,但是VIP车主就不用排队,直接去享受服务。
运行队列也是如此,用进程的优先级进行排队。可不是先来先得,是按照优先级来排列的,假如刚来了一个进程,它的优先级高,那它肯定排在优先级低的前面,可不管你先来后来。
4.1 查看进程的优先级
用这个命令去查看:
ps -l

-PRI :进程的优先级,数值越小,优先级越大,PRI默认为80
-NI :nice值,进程优先级的修正值,PRI(new)=PRI(默认)+NI
nice值是为了修正PRI值,它的范围是-19~20,也就是40个nice值。nice值为负数,进程的优先级会提高;如果是正数,进程的优先级会变低。这nice范围也不大,这为了防止“饥饿进程”的出现,如果把一个进程的优先级调的非常低,导致进程一直都无法运行,也就是饥饿进程,必须保证每个进程都有口饭吃。
4.2 修改进程优先级
用top命令可以修改进程优先级。
进入top后,
输入r,
再输入进程的PID
最后输入nice值
按q退出
验证:
死循环,方便验证。注意验证要用ps -al指令查看。
#include<stdio.h>
#include<unistd.h>
#include<stdlib.h>
int main()
{
while(1)
{
printf("hollow PRI\n");
}
return 0;
}

(1)进入top
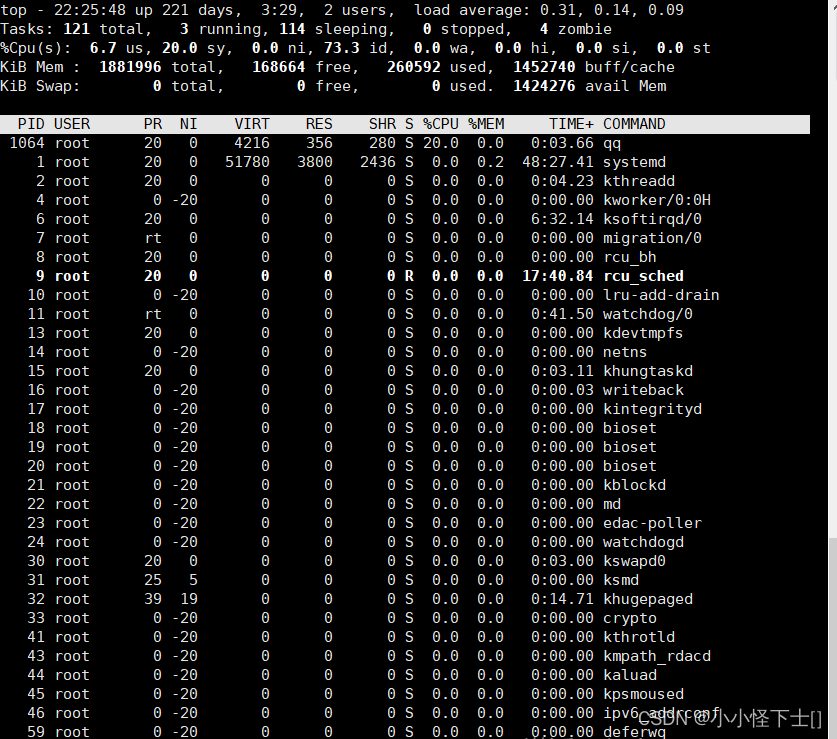
(2)输入r,再输入PID,再输入nice值.(每次输入后按回车,这是常识)
大家可以用翻译一下top里的这句话,一般能看懂。

很明显我输入的nice值是10,所以qq这个进程的PRI变成了90。

注意:nice值输入100,-1000,这种超出范围的值,也不会报错之类的,默认会修改成nice值的最大(20),或者最小(-19)。
结尾语: 这就是进程的基本概念了,后续还会更新进程的知识。喜欢的朋友,可以点点关注。